

关于船用吊机的装配
船用吊机,是船舶自备的用于装卸货物的关键装置和机械,主要由高强度钢板制成,主要部件包括基座、吊臂、吊钩、滑轮组等。由于其使用环境往往是在海上作业,其使用期间除需承受常规吊机吊起货物的重量外,船身的晃动等还会造成吊机部件承受更多的外力。由此,船用吊机无论是在部件生产还是装配环节,对于精度误差的把控都十分严格。
客户的检测需求
我们的客户欲为其大型作业船只添加伸缩式吊机,以用来执行在海上的作业任务。在本案例中,客户希望对其船用吊机部件在装配过程中实施关键部件部位的三维测量检测,并使用数字化技术指导该吊机的装配,主要需求如下:
① 对基座固定孔位的位置度进行检测,测量精度要求±0.1mm;
② 对安装基座平面度进行测量检测,测量精度要求±0.05mm;
③ 希望在最终装配时,使用数字化技术指导其实时装配,以保障装配质量;
④ 希望满足其精度要求的同时兼顾测量效率。

图1:Radian系列激光跟踪仪
API测量解决方案
综合客户的测量需求,API提供了使用Radian Plus激光跟踪仪的测量解决方案。
激光跟踪仪,是大尺寸精密测量领域的代表性解决方案,其已被广泛应用于各行业高端制造以及科研院所的学术研究中。Radian Plus激光跟踪仪,是API公司开发的第五代激光跟踪仪,其具有量程大、精度高、易操作、无线数据传输、集成温度/气压补偿和极致便携等特点,代表了世界尖端的激光跟踪测量技术。
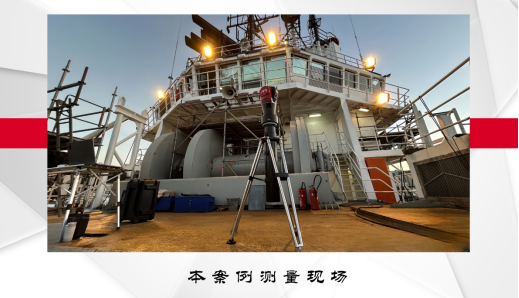
图2:本案例测量现场
测量过程
一、设备布设
本案例中,应用工程师使用便携式设备三脚架架,将Radian Plus激光跟踪仪布设于待测船用吊机基座的周边,使激光可通视待测目标位置。
二、数据采集
实施数据采集时,测量工程师手持带有内置棱镜的跟踪仪靶球(SMR)在待测部件的待测位置进行触碰,Radian Plus主机射出一道激光并实时锁定SMR的中心位置,当靶球触碰待测位置时,随即以1000Hz的测量速率对该位置的空间坐标数据进行快速采集,并传输至笔记本电脑端的测量软件保存用于后续分析。
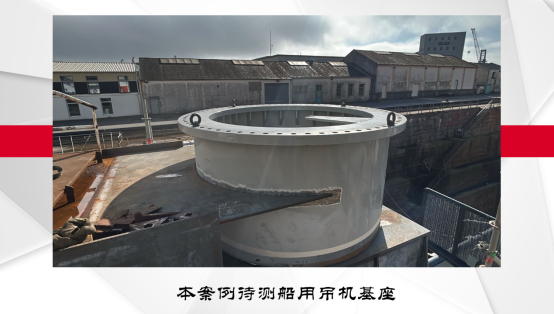
图3:本案例中测量的船用吊机基座
三、数据分析
当所有待测位置待测点的空间坐标数据采集完毕,即可在测量软件中找到相应的点,使用这些点构建相应的线、面、体等,并设置公差范围、与理想值进行比对,得到偏差数据,即可实现测量检测的目的。
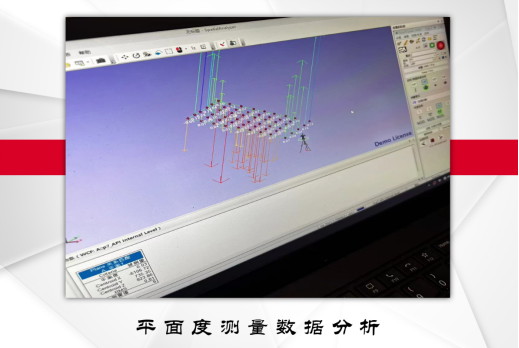
图4:平面度测量数据分析
四、分析报告
可在测量软件中,根据所需报告内容进行筛选和标注,并自动计算、生成测量分析报告。
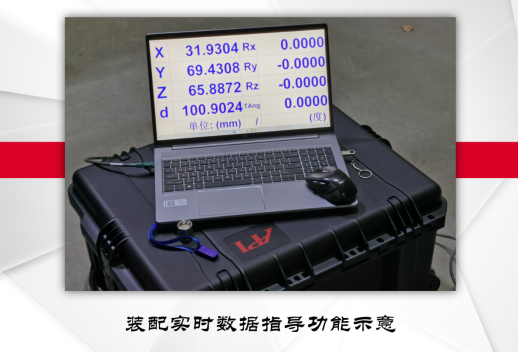
图5:数字化装配指导示意
实时装配指导
在进行装配时,基于Radian激光跟踪仪的数据高速采集能力以及动态采数性能,在测量中,可实时精确显示位置坐标数据,操作工程师可根据实时坐标数据及理论数据的偏差值,实时调整部件位置,直至最佳状态,实现对装配的实时指导。
总结
Radian Plus激光跟踪仪具备精度高(微米级别)、测量范围广(至160米)、功能丰富(可配备多种隐藏点、扫描、6DoF、主动跟踪等拓展附件)、操作简单、动态性能佳(1000Hz采数速率)等特点,充分满足了客户对于船用吊机部件检测与装配指导的测量需求。
此外,除本案例中应用的Radian Plus型号外,API品牌还根据应用场景的不同,为您提供Radian Core以及Radian Pro型号激光跟踪仪。
相关新闻:

API邀您共聚2025慕尼黑上海光博会
2025慕尼黑上海光博会 慕尼黑上海光博会是德国慕尼黑博览集团在上海举办的激光、光学、光电行业的专业展览会,其影响范围依托中国,辐射亚太、东南亚、中东及全球,是
Radian激光跟踪仪在风力发电机 门架检测领域的应用
对风力发电机门架测量领域的探索 风力发电机门架是构建风力发电机支撑部分最重要的核心组成部分:具有尺寸长、宽度小、待测特征因焊接件极易变形等复特点,极易造成门机架
API科技产品为人形机器人核心部件研发与制造 提供测量技术支撑与数据精准保障
继2025年2月12日期中国中央电视台 “新闻联播” 栏目中播报的《关于中国机器人产业发展》的相关报道中展示了API品牌Radian激光跟踪仪在工业机器人与人形

了解更多:

激光跟踪仪靶球&测头
Maximize laser tracker productivity with hand held and 激光跟踪仪主动靶标.

XD Laser CMM Calibration
The XD Laser is the only assessment system that can measure all 6 error parameters simultaneously in a single set-up
了解更多 /xd-laser
API Reverse Engineering Service
Reverse engineering services include scan as-built parts to creation of a 3D digital point cloud and CAD Model.